ASTM E2919 3D Vision Systems Evaluation Testing
The ASTM E2919 standard provides a framework for evaluating the performance of three-dimensional (3D) vision systems, which are critical components in autonomous vehicles and advanced driver assistance systems (ADAS). This service is essential for ensuring that 3D vision systems meet stringent accuracy requirements to support safe and reliable vehicle operation. The test involves multiple phases including hardware calibration, software validation, and functional performance assessment.
The evaluation process begins with the rigorous setup of a controlled environment where both hardware and software aspects are tested separately before being integrated into a comprehensive system. During this phase, we use specialized tools to calibrate 3D vision cameras ensuring they operate within defined tolerances specified in ASTM E2919.
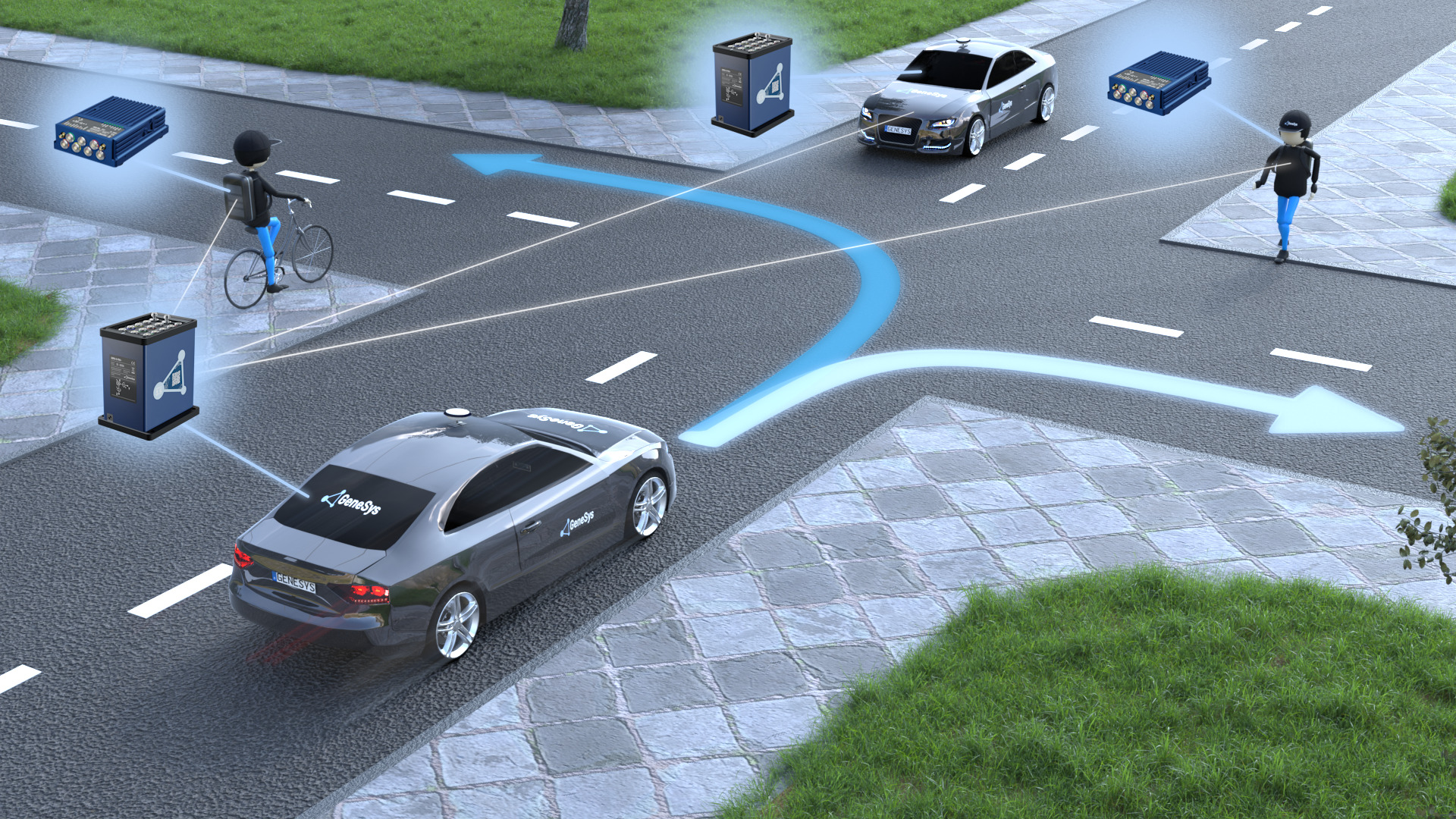
The subsequent step focuses on verifying the accuracy of algorithms used by these systems for object detection and tracking. This includes evaluating how well the system can differentiate between various types of objects under different lighting conditions, angles, and distances from the vehicle. For instance, it's crucial that the 3D vision system accurately identifies pedestrians, cyclists, road signs, lane markings, etc., regardless of their position or orientation relative to the vehicle.
Once individual components have been validated independently, they are combined into an integrated test setup designed to mimic real-world driving scenarios. In this context, we simulate various challenging conditions such as rain, snow, fog, varying levels of sunlight intensity, and different road surfaces. By doing so, we can assess how effectively the 3D vision system performs across a wide range of environmental factors that might affect its operation.
An important aspect of this testing is understanding how well the 3D vision systems respond when faced with unexpected situations or anomalies during normal driving conditions. For example, if a person suddenly steps onto the road where there was no previous indication of their presence, would the system detect them promptly enough to trigger appropriate responses like braking? Similarly, it’s also important to check whether these systems can handle sudden changes in traffic patterns or other dynamic elements that could impact safe navigation.
Another key component involves assessing the robustness and reliability of 3D vision systems over extended periods. Since autonomous vehicles need to operate continuously without significant disruptions due to system failures, it's vital to ensure that these components remain stable throughout their lifecycle. Therefore, extensive endurance tests are conducted which simulate long hours or days of continuous operation under various stress conditions.
The results from ASTM E2919 evaluation testing provide comprehensive insights into the capabilities and limitations of 3D vision systems used in automotive applications. These findings help manufacturers identify areas for improvement while ensuring compliance with relevant safety regulations. By adhering strictly to this standard, companies can gain confidence that their products meet industry benchmarks and contribute positively towards enhancing overall road safety.
| Condition | Description |
|---|---|
| Environmental Factors | Including rain, snow, fog, varying levels of sunlight intensity, and different road surfaces. |
| Unexpected Situations | Such as a pedestrian suddenly stepping onto the road where there was no previous indication of their presence. |
| Dynamic Elements | Changes in traffic patterns or other elements that could impact safe navigation. |
Scope and Methodology
The scope of ASTM E2919 evaluation testing encompasses several key areas critical to ensuring the reliability and accuracy of 3D vision systems in automotive applications. The primary focus is on evaluating the performance of these systems across various parameters, including but not limited to object detection, tracking capabilities, environmental adaptability, robustness under extended use, and safety compliance.
One crucial element within this scope involves assessing the precision with which 3D vision cameras capture images and convert them into three-dimensional data points. This process requires precise calibration techniques to minimize errors that could arise from misalignment or other hardware issues. Additionally, software algorithms play a vital role in interpreting this raw data correctly, making accurate identifications of objects within the environment.
In terms of methodology, ASTM E2919 specifies detailed procedures for conducting evaluations. These include setting up controlled environments that replicate realistic driving scenarios as closely as possible. The use of advanced simulation software allows us to generate virtual worlds that can be used to test different aspects of 3D vision systems' performance under varying conditions.
During actual testing, we employ a multi-step approach involving initial hardware calibration followed by comprehensive validation exercises for both hardware and software components separately. After confirming individual component performances meet expected standards, these elements are integrated into an overall system configuration that undergoes further rigorous tests simulating real-world driving situations.
The integration phase is particularly challenging due to the need to ensure seamless interaction between all parts of the 3D vision system. This includes verifying data flow from sensors to processors and ensuring correct processing outputs align with expected results based on ASTM E2919 criteria. Throughout this process, continuous monitoring ensures any discrepancies are addressed promptly.
Another critical aspect of our methodology involves conducting endurance tests that assess the longevity and stability of 3D vision systems over extended periods. Given that autonomous vehicles must operate continuously without significant disruptions from system failures, it's essential to evaluate how well these components perform under sustained usage conditions. By subjecting them to prolonged testing scenarios, we can identify potential weaknesses or areas requiring improvement.
Finally, the results obtained from ASTM E2919 evaluation testing serve as valuable benchmarks for comparing different models of 3D vision systems. This information helps manufacturers make informed decisions about enhancements needed to meet increasingly stringent safety standards while maintaining optimal performance levels.
International Acceptance and Recognition
The ASTM E2919 standard for evaluating 3D vision systems has gained widespread recognition within the automotive industry, particularly in regions committed to advancing technology-driven safety measures. Countries like the United States, Canada, Europe (through EN standards), and Asia-Pacific nations have actively adopted this framework due to its comprehensive approach to assessing critical components.
Within North America, the U.S., along with its neighbors, has seen significant traction towards integrating ASTM E2919 into regulatory frameworks governing autonomous vehicle development. Regulatory bodies such as NHTSA (National Highway Traffic Safety Administration) and FMVSS (Federal Motor Vehicle Safety Standards) have begun incorporating aspects of this standard to guide manufacturers in ensuring compliance with safety regulations.
In Europe, the adoption of ASTM E2919 aligns closely with broader initiatives aimed at enhancing road safety through advanced technologies. The European Union’s New Approach Directive for type approval of motor vehicles incorporates certain elements from ASTM E2919 into its guidelines for ADAS and autonomous driving systems.
Similarly, in the Asia-Pacific region, countries like Japan, South Korea, Australia, and others have shown interest in aligning their standards with those specified by ASTM. This move reflects a global trend towards harmonization of testing methodologies across borders to foster innovation while maintaining consistent safety standards.
The international recognition of ASTM E2919 highlights its importance not just within specific regions but globally as an authoritative source for assessing 3D vision systems in automotive applications. By following this standard, manufacturers can ensure their products meet rigorous quality benchmarks accepted worldwide, thereby facilitating smoother market entry and broader customer acceptance.
Use Cases and Application Examples
The ASTM E2919 evaluation testing of 3D vision systems finds extensive application across various sectors within the automotive industry. These systems are integral to several key areas including autonomous driving, advanced driver assistance systems (ADAS), and enhanced pedestrian safety.
Autonomous Driving: One primary use case involves evaluating how effectively 3D vision systems can detect and track multiple objects simultaneously in real-time during self-driving operations. This capability ensures that vehicles can react appropriately to dynamic changes on the road, such as identifying pedestrians crossing at crosswalks or cyclists merging into lanes.
Advanced Driver Assistance Systems (ADAS): Another critical application focuses on assessing ADAS features like adaptive cruise control and lane-keeping assist systems. Here, 3D vision cameras play a crucial role in providing accurate data about surrounding vehicles, road boundaries, and other environmental factors that enable these systems to function safely.
Enhanced Pedestrian Safety: In urban environments, pedestrian detection is paramount for ensuring public safety around autonomous vehicles. By using 3D vision systems, we can evaluate their ability to accurately identify pedestrians at various distances and angles, thereby supporting safer interactions between humans and self-driving cars.
Another area of focus involves evaluating the robustness of 3D vision systems under challenging environmental conditions such as inclement weather or poor lighting. This ensures that these components remain reliable even when faced with adverse situations commonly encountered during real-world driving scenarios.
In addition to these core applications, there are emerging trends in leveraging 3D vision technology for other purposes like obstacle avoidance and intelligent cruise control. These advancements continue to push the boundaries of what is possible within autonomous vehicle design.
| Use Case | Description |
|---|---|
| Autonomous Driving | Evaluating how effectively 3D vision systems can detect and track multiple objects simultaneously. |
| Advanced Driver Assistance Systems (ADAS) | Evaluating ADAS features like adaptive cruise control and lane-keeping assist systems. |
| Enhanced Pedestrian Safety | Evaluating the ability to accurately identify pedestrians at various distances and angles. |
| Robustness in Environmental Conditions | Evaluating 3D vision systems' reliability under challenging environmental conditions. |



